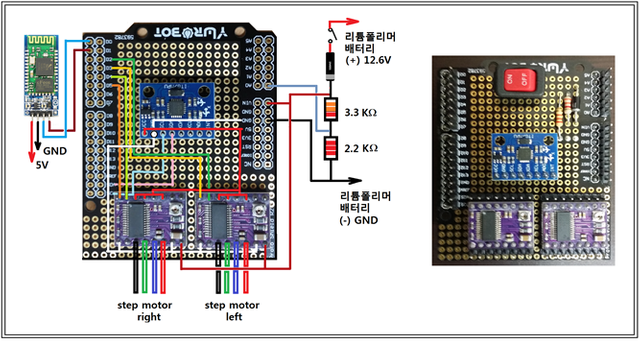
Brokking 의 회로 배선과 현재 Balancing Robit 배선을 검토하여 다음과 같이 PCB쉴드를 디자인하였다. 목적은 가능한 한 배선 수를 줄여 제작을 간편하게 하기위함이다. 보드 외부에 그려진 다이오드와 2개의 저항과 스위치는 MPU6050 위 PCB 공간에 배치할 수 있음에 유의하자....

이 배선을 참조하여 각자 밸런싱 로봇 배선회로 제작에 참조하기 바란다.
⓵ 리튬 폴리머 배터리와 연결하는 스위치는 토글 스위치 보다 시소 스위치가 훨씬 편리하다.
⓶ 다이오드는 역류 방지 안전 기능이므로 반드시 넣는다.
⓷ 12V 전원은 다이오드를 지난 후 쉴드의 Vin 과 DRV8825 드라이버 보드에 점퍼선 보다는 굵은 전기배선을 납땜하도록 하며 GND 즉 리튬폴리머 배터리 0V 선도 굵은 배선을 하여 쉴드 보드에 납땜한다.
⓸ 3.3K 와 2.2K 사이 전압이 대략 5V 인데 코드에서 전압을 analogRead 명령으로 읽어 모니터링 하므로 A0 에 연결 납땜 하도록 한다. 점퍼선 굵기면 충분하다.
⓹스테퍼 모터와의 연결부위 4핀은 아예 커넥터 형태로 만들어서 설치하고 모터에서 나오는 배선 끝 부분도 커넥터로 하여 빡빡하게 끼우도록 한다.
⓺ HC-06 블루투스 보드는 점퍼선 배선이 원칙이며 아울러 디지탈 데이터 핀 2,3,4,5 번 연결도 점퍼선으로 할 수 있도록 처리한다.
⓻2개의 저항과 스위치가 쉴드 보드 밖에 그려 두었으나 쉴드 보드 상단에 빈공간이 있으므로 이곳으로 옮겨 배선하면 쉴드 보드 한 장 배선이 가능하다.
⓼ 쉴드보드의 다리 배선은 높이가 높은 것으로 처리해야 USB 커넥터와 DC 어댑터 잭과의 간섭을 피할 수 있다.
⓽ 쉴드 보드 양측의 핀 배선은 2줄을 다 살려서 배선하되 안쪽의 커넥터는 숫놈 형태로 하는 것이 사용에 편리하다.
다음의 배선도 그림과 실제 부품을 배치하여 납땜 작업을 일부 진행한 한 결과이다. 이 납땜 과정은 납땜 전문가의 손길이 다소 필요한 분야임에 유의하자. 뒷면의 배선 납땜 결과는 따로 사진을 준비해서 준비해 올릴 계획이다. 아울러 코드 수정할 부분, 모터 드라이버 회로 전류 조정 과정에 관한 추가 정보도 곧 올릴 예정이다.
'아두이노프로세싱 프로그래밍' 카테고리의 다른 글
| 밸런싱 로봇 DRV8825 모터 드라이버 보드 전류 설정 (0) | 2018.09.07 |
|---|---|
| 4200mA 리튬배터리를 추가로 짊어진 아두이노 밸런싱 로빗의 택배 능력 시험 (0) | 2018.09.07 |
| 새로운 밸런싱 로봇 모델 (0) | 2018.08.28 |
| 오후의 소일거리로 보는 Brokking의 밸런싱 로봇짤 (0) | 2018.08.21 |
| Brokking의 오픈소스를 이용한 밸런싱 로봇 (0) | 2018.08.21 |