7-3 HERE HD Live Map Layers
참조: HERE HD Live Map Layers
https://kr.mathworks.com/help/driving/ug/here-hd-live-map-layers.html
HD 맵을 사용하여 자율주행 차량이 주행한 궤적을 찾아 디스플레이 하는 작업은 스마트폰에서 카카오 맵이나 티 맵을 사용하여 출발지와 도착지를 지정한 후 주행 궤적을 관찰하는 정도의 문제로서 특별할 것은 없다고 본다.
이번 절에서는 한 걸음 더 나아가 HD 라이브 맵 레이어 구성 방법 및 그 데이터 이용법을 살펴보자. MATLAB 코드는 참조 url 주소에서 다운 받기 바라며 여기서는 원리 해설에 중점을 두도록 한다.
HD(High Definition) 맵 은 일반 네비게이션 맵과 내용은 유사하나 위치 정밀도가 적도 근방에서는 1 cm 급으로서 자율주행에서 요구되는 10 cm 정밀도를 만족할 수 있어야 한다.
MATLAB 사이트에서 서비스되는 HERE HD Live MAP(HERE HDLM) 은 클라우드 기반 웹서비스로서 정밀하며 연속적으로 업데이트 된 맵 데이터 처리를 가능케 해준다.
이 맵 데이터는 도로들과 차선들에 대한 지형학과 기학학적인 특성 정보, 도로 및 차선 수준 속성 정보를 포함하도록 타일화 된 형태를 취하며, 지리학적 영역에 상응하는 일련의 맵 카타로그로 저장되어 있다. 맵 타일의 선택을 위한 레이어 데이터에 접근하기 위해서는 hereHDLMReader 명령을 사용한다.
다음과 같이 3종류의 모델로 그룹화 되는 맵 레이어를 살펴보자.
① Road Centerline Model: 길의 지형학, 형상 기하 및 기타 길 수준 속성들
⓶ HD Lane Model: 차선 지형학, 고정밀 기하하학, 차선 수준 속성 정보들
⓷ HD Localization Model: 로컬라제이션 전략을 지원하기 위한 도로 표지판과 같은 다양한 특징들

맵 레이어의 이용 가능 여부는 지리학적 영역마다 다르다. 모든 타일형 맵에서 3가지 레이어 전체를 이용할 수 있는 것은 아니다. hereHDMLReader 객체상에서 맵 레이어 명을 구체적으로 지적할 때에 read 함수를 부르면 함수는 레이어 데이터를 객체로 돌려주게 된다.
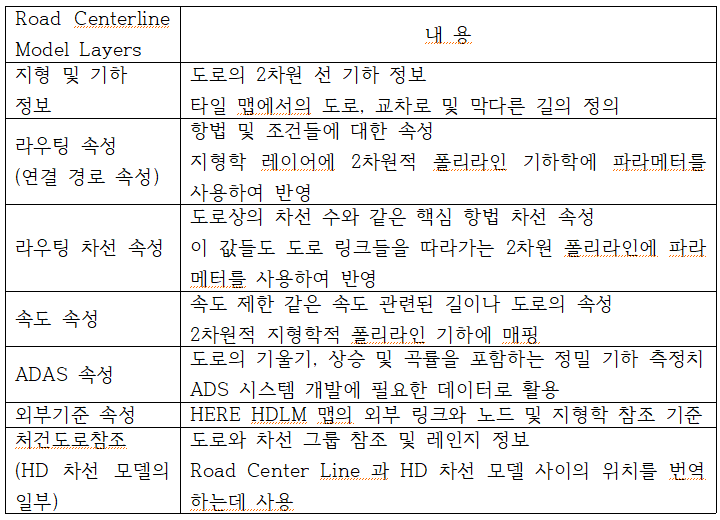
Road Centerline Model
네트워크화 된 도로를 나타내며, 교차로와 막다른 도로에 해당하는 도로의 링크들과 노드들로 이루어진다. 각 타일 맵에서 이 레이어는 2차원적 도로 및 길 네트워크 선 기하학 정보와 주행속도 속성 및 연결 경로 속성들을 포함한다.
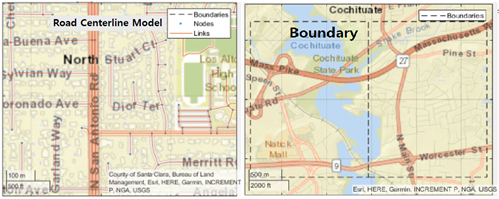
아래 왼쪽 그림의 Road Centerline Model을 참조하자. 왼쪽 그림에서 Boundary 즉 경계선이 잘 안보이지만 대신에 오른쪽을 참조하자.
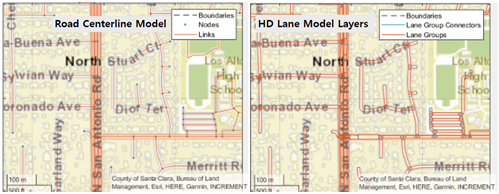
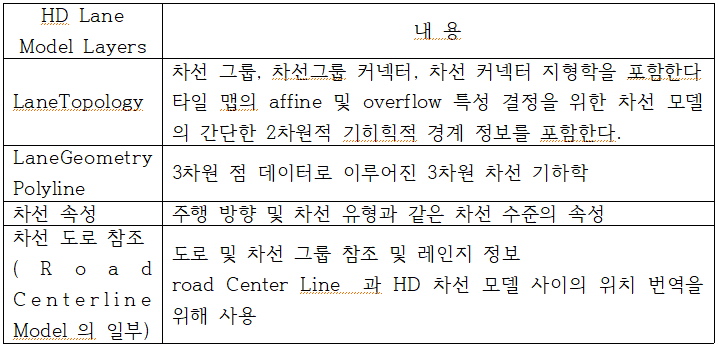
HD 차선 모델
도로에 해당하는 링크 내의 차선들로 이루어진 차선그룹의 지형학 및 기하학적 모양을 나타낸다. 차선의 모양은 2차원 또는 3차원 위치로 모델되며 1 cm 수준 정밀도를 지원한다.이 모델은 차선 유형, 주행 방향, 차선 경계 색깔 및 스타일을 포함하는 차선 속성들을 제공한다. 아래 그림의 사례를 참조하자. 중앙선(Centerline)과 차선이 분명히 서로 다르게 표현되어 있다.
HD 로컬라이제이션 모델
이 모델은 교통신호, 장벽, 및 교통신호등 기둥과 같이 도로에서 자율주행에 도움을 줄 만한 데이터를 포함한다. 아직은 reader 명령이 이 레이어 데이터의 가시화를 지원하지는 못한다는 점에 유의하자.

결국 HD 멥은 1cm 수준까지 도로 중심으로 세밀하게 기록한 지도로서 클라우드로부터 정보를 다운받아 사용해야 하므로 자율주행 차량에서 사용하려면 자율주행 차량 컴퓨터 시스템의 연산성능과 통신성능에 큰 영향을 받음을 알 수 있다. 현재 이 기법을 사용하여 waymo를 비롯 많은 데모가 이루어지고는 있으나 오히려 카메라 비젼만 사용하는 Teslar 시스템에 비해 가성비 차원에서 양산으로 가기에는 큰 장애로 남아 있다.
'자율주행' 카테고리의 다른 글
| 7장 Mathworks 자율주행 MATLAB 코딩 (IV)고속도로 차선변경 (0) | 2022.10.21 |
|---|---|
| 7-4 HD 라이브 맵 레이어 구성 (0) | 2022.10.13 |
| 7장 MathWorks 자율주행 MATLAB 코딩 II (0) | 2022.09.28 |
| 7장 MathWorks 자율주행 MATLAB 코딩 I (0) | 2022.09.28 |
| 캡스톤 코딩 디자인: YoLoV3에 Vision 코드를 추가하여 ADAS 를 코딩하자. (0) | 2022.09.21 |