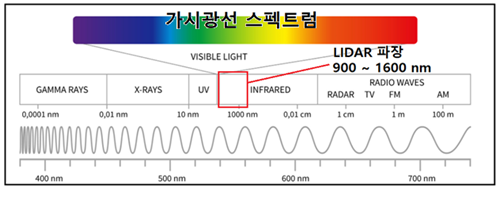
라이다는 자율주행 차량 주위의 객체들까지의 거리를 측정하기 위해서 펄스 형태의 레이저를 이용한다. 가시광선이 대체로 900 nm 이하 파장 영역임에 비해 벨로다인 라이다 센서 사례에 의하면 900 ~ 1600 nm 의 주파수 범위를 가지는 적외선 영역에 근접한 레이저로서 905 nm 와 1550 nm 가 사용된다, 특히 1550 nm 파장은 905 nm 파장에 비해 우중이나 안개가 낀 경우나 눈이 올 때 그리고 지표면이 젖었거나 눈으로 덮였을 경우 반사 수신 신호에 심각한 품질 저하가 일어난다. 신호 상당한 품질 저하가 있음에 유의하자.
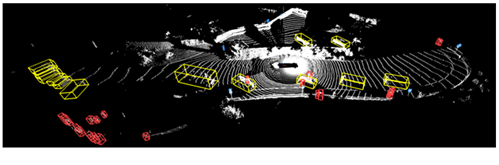
라이다는 레이저, 스캐너, 및 특수한 GPS 수신기로 구성된다. 라이다 센서는 연속적으로 회전하며 초당 수천 개의 라이다 펄스를 생성한다. 이 라이다 레이저 펄스들은 빔화되어 자율주행 차량 주위 360도 범위에 방사되며 주행 도로 주위의 객체들에 의해 반사되어 입력된다.
입력된 3차원 신호들은 실시간 3차원 그래픽이미지 또는 주변의 360도 뷰를 포함하는 3차원 지도로 변환된다. 라이다 시스템은 대략 100 – 200 메터까지도 포함하는 원거리까지 객체들의 탐지와 정밀한 3차원 형상 인식을 가능하게 한다. 라이다 시스템의 3차원 지도화 능력은 주변 차량, 보행자, 가로수, 사람 및 여타 객체들을 분간하는데 도움이 된다.
라이다 측정 데이터를 사용하여 자율주행 차량 자신의 위치를 알아내기 위해서 point cloud matching 기법이 사용된다. HD(High Definition )맵과의 비교를 통해 라이다 센서 데이터는 글로벌 위치 정보를 제공하게 된다.
이러한 라이다 로컬라이제이션 기법은 강력한 이점을 제공하는 반면에 라이다 사용에 있어서 어려운 점은 HD 맵을 계속적으로 업데이트해야 한다는 점과 보행자, 자동차, 자전거를 포함하는 변동 요인들도 실시간으로 끓임 없이 업데이트 해야 한다는 점이다. 특히 전 세계적으로 도시화가 급격히 진행되고 있어 HD 맵의 업데이트 부담이 엄청나 비용이 문제가 될 수밖에 없다.
한편 라이다는 가시광선이 아니기에 교통 신호들의 RGB 색상을 인식할 수 없다는 불리한 특성이 있다. 또 다른 불리한 점은 라이다의 파장이 불순한 날씨나 기온에 의해 심각한 영향을 받을 수도 있는바, 즉 라이다 탐지기 센서의 S/N 비가 영향을 받을 수 있다는 점이다. 아울러 라이다는 가격이 극히 비싸며 차량 상부에 설치해야 하므로 더 이상 자동차의 미관 유지가 불가능해진다. 이러한 점에서 당분간 택시나 상용차 정도 수준까지 적용이 가능할 것이다.
앞서 언급된 라이다의 기술적으로 불리한 점들 때문에 카메라와 함께 사용될 수밖에 없다는 점에 유의하자.
참조: Understanding Localization in Self-Driving Cars https://medium.com/self-driving-cars/understanding-localization-in-self-driving-cars-and-its-technology-ad3b96caa466
'자율주행' 카테고리의 다른 글
| 7장 MathWorks 자율주행 MATLAB 코딩 I (0) | 2022.09.28 |
|---|---|
| 캡스톤 코딩 디자인: YoLoV3에 Vision 코드를 추가하여 ADAS 를 코딩하자. (0) | 2022.09.21 |
| Colab 에서 YoLoV4 를 실행해 보자. (0) | 2022.09.18 |
| OpenCV Hough Transform에 의한 차선 작도 VIII (0) | 2022.09.16 |
| OpenCV Hough Transform에 의한 차선 작도 VII (0) | 2022.09.13 |