1-1 자율주행 소개
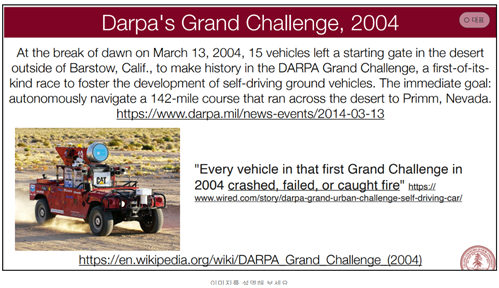
자율주행 차량 연구는 미국 DARPA 에 의해 시작되었으며 스탠포드,카네기멜론 대학팀들이 주도했다. 2004년 캘리포니아 바스토우 외곽의 사막지대에서의 첫 번째 챌린지는 모조리 쳐박거나 고장나거나 불이 나버리는 처참한 결과였으나 2005년에는 5개팀이 212 km를 성공적으로 주행하는 기록을 세웠다.
그 후 스탠포드 팀에 속한 교수가 구글로 이적하여 2009년부터 자율주행 차량 연구가 시작되어 2017년에 공식적으로 Waymo 사업으로 스핀오프가 이루어졌다.
하지만 자율주행은 자동차 자율주행에만 한정되는 것이 아니라 서빙로봇, 청소로봇, 우주 탐사로봇, 드론, 무인 항공기, 선박에 이르기까지 인공지능 탑재 자율주행 적용을 위한 연구가 폭넓게 이루어지고 있으므로 그 내용을 간단히 살펴보자.
식당에서 볼 수 있는 서빙 로봇은 통로에서 고객들과 마주쳐 지날 때 어떤 행동을 보이는지 살펴본 적이 있는가? 서빙 로봇의 가격이 그렇게 비싼 제품이 아니므로 고가의 라이다나 레이더 센서를 장착할 리는 없을 것이다. 관찰해본 바에 의하면 서빙 로봇이 비젼 카메라를 사용하여 지나가는 고객들이 확인되면 잠깐 멈추는 것이다. 사람들이 다 지나간 후에 다시 주행한다. 목표 방에 도달하면 회전하여 방향 전환 후 방으로 음식을 배달한다. 즉 서빙 로봇이 학습에 의해 인식이 가능한 식당 환경에서 목적지로 향하는 자율주행이 가능할 것이다. 음식 배달이 완료되면 서빙 로봇이 음식 전달 작업이 완료되었는지 고객에게 문의할 것이며, 고객이 확인해 주게 되면 서빙 로봇이 주방으로 귀환하게 된다.
이러한 서빙 로봇에 적용되는 기술로는 로봇 주행을 모니터링 제어하는 IMU( inertial measurement unit) 기술, 실내 환경 및 사람의 존재 여부 인식을 위한 컴퓨터 비젼기술이 핵심이다.
청소로봇도 사람 및 장애물을 확실하게 식별하여 우회할 수 기능을 가진다. 360도 회전 가능한 라이다 센서가 사용되어 실내 환경을 스캔 후 맵 (map)을 작성하고 청소로봇의 활동 범위를 스스로 결정함과 아울러 충전 포트를 찾아내어 자율적으로 충전한다.
2012년 화성에 보낸 우주탐사로봇 curiosity와 2022년 드론과 함께 보낸 perseverence rover도 자율주행 기능이 필수적이다. 지구와의 교신 간격이 10분 이상이므로 뒤집히는 일 없이 안전을 유지하면서 대부분의 과학적 임무 수행을 스스로 해야 한다.

현재 이미 군용 및 상용에 이르기까지 많은 응용이 이루어지고 있는 드론의 경우도 특히 유인 전투기와 함께 군집 비행이 가능하도록 인공지능을 탑재한 무인 전투기 개발이 활발하게 이루어지고 있다.
그러한 분야별 자율주행 응용에 있어서 공통적이라 볼 수 있는 점은 스스로 위치를 확인하고 속도, 가속도, 회전속도를 제어하여 충돌을 피하면서 목적지에 도착해야 한다. 특히 자율주행에서 인간이 승차하는 자율주행과 자율주행 중 맞닥뜨릴 대상이 사람이나 동물일 경우 안전 문제로 인해 기술적인 난이도가 더욱 증가하게 된다.
자율주행 관련 기술
자율주행 차량에서 스스로 위치를 확인하고 속도, 가속도, 회전속도를 제어하기 위해 준비해야 될 기술들을 간단히 살펴보자.
현재 위치, 출발지, 목적지의 위치 파악을 위해서는 GPS를 사용하는 것이 편리하다. 자율주행 차량이 손님을 태우기 위해 정차해 있는 위치는 자율주행 차량 스스로 GPS에서 출발지 위치 정보를 읽을 수 있을 것이다. 승차 후 제시되는 목적지 정보를 조회하여 route 설정이 이루어지게 된다. 하지만 출발 이후 벌어지게 될 첫 번째 문제로서 GPS의 위치 정보 오차가 적어도 1 미터 이상이며 업데이트 시간 주기가 0.1초 단위로 늦은 편이어서 이 정보에 의존한 자율주행이 불가능하다는 점이다.
한편 초창기에 주목받았던 기술로서 particle filtering 기법이 있다. 이 기법은 Gaussian 입력 데이터에 적합한 Kalman 필터링 기법보다 좀더 복잡한 Non-Gaussian 입력 데이터에도 적용할 수 있는 기법이긴 하지만 GPS 위치정보 입력 데이터 오차가 1 미터 이상이기에 아무리 제어를 잘해도 안전한 시내 주행을 보장할 수 있는 범위 즉 10cm 이내로 제어하기는 불가능하다. 2010년 이전 DARPA 컨테스트에 출전했던 대학팀에서 적용을 시도했던 적이 있지만 자율주행이 요구하는 정밀도 문제로 인해 또 다른 기술을 찾아야 할 것이다.
아울러 라이다(lidar)로 측정되는 3차원 데이터에 particle filtering을 적용하는 시도들이 있기는 하다. 측정 및 맵(map) 작성까지는 가능하겠지만 자율주행 차량의 컴퓨터 메모리 용량 및 연산 성능 차원에서 실시간 처리는 요원해 보인다.
2022년 테슬러에서는 현재 슈퍼컴퓨터에 해당하는 DOJO 보드를 개발하고는 있지만 한편으로는 자동차 부품으로서는 너무나 고가인 라이다 센서 채택을 배제하고 인공지능과 컴퓨터 비젼 기술로만 이루어진 자율주행 시스템을 개발 중이다.
테슬라의 이러한 판단은 테슬라사의 자신감이 넘치는 기술력 때문은 절대 아닐 것이다. 만약 자율주행이 가능한 로보택시 사업을 할 경우 도대체 요금을 얼마나 받아야 감가상각 문제를 감안한 자율주행 차량 투입이 가능할 것인가 하는 점이다. 현재로서는 라이다에 관한 기술적 연구 말고는 상용화 측면에서는 부정적으로 판단된다. 테슬라를 포함한 기존의 차량 제조사에서도 라이다 탑재에 따른 자율주행 연구 경험이 없는 것은 아니지만 차량 판매를 위한 라이다 부품의 가격 문제는 지금까지는 해결이 불가능하다고 판단하는 듯하다. 반면에 waymo 같은 연구 그룹들이 이미 많은 기술적 업적들을 쌓아가고는 있지만 이들이 차량 제조사가 아니므로 그들의 라이다 기반 자율주행 시스템이 앞으로 채택될지 가능성 여부는 두고 보아야 할 것이다.
2023년 현재 자율주행 기술의 표준이 확립되지 않아 혼란한 상태이지만 그래도 자율주행 기술에 관심이 있다면 밟아 나가야 할 많은 내용들 중에 중요하다고 볼 수 있는 일부 내용을 정리해 보자.
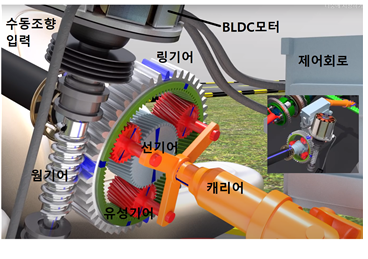
⓵ 레벨 5까지 분류되는 현재의 자율주행 차량은 비상시 인간 운전자와 교대를 필요로 한다. 즉 운전대(steering column)가 인공지능 컴퓨터 시스템에서 인간에게로 옮겨 와야 한다는 점이다, 이 문제에 대한 기술적인 해답은 유성기어 사용에
있다. 즉 유성기어는 외부로부터 두 종류의 입력을 받을 수 있다. 첫째는 자율주행 차량의 컴퓨터로부터의 입력이며 이는 모터를 통해 전달될 것이다. 아울러 인간 운전자에게 권한이 넘어갔을 때 매뉴얼 방식에 의해 직접 운전대를 조작함으로 조향이 가능하게 된다. 때로는 권한 이양 과정 중 다소 오버래핑이 있어도 한쪽 입력은 약해지고 새로이 입력이 들어오게 되므로 별 문제는 없다.
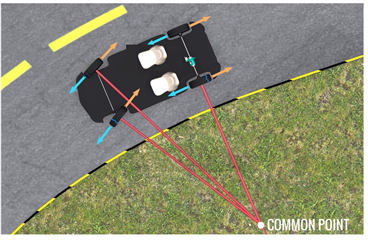
⓶ 인공지능 기반의 자율주행을 위한 운전대(steering column) 조작에 따른 바퀴 조향 메카니즘의 반응은 각도측정 센서 신호 연구를 통해 제동장치도 연동되어 움직이므로 운전 상황에 따라 자연스럽게 반응할 수 있도록 장치를 제작해야 할 것이다. 즉 능숙한 인간 운전자 수준 이상으로 운전대를 제어할 수 있어야 한다. 2022년까지 적용되고 있는 자율주행 레벨2 수준의 제동 시스템은 차선을 유지하는 범위로 제한되고 있으나 차선 변경을 감안하여 자율주행 소프트웨어 시스템이 업그레이드 되어야 할 것이다.
⓷ 1 미터 이상의 오차로 인해 구체적인 차선 확인까지는 불가능한 GPS 네비게이션 시스템은 과연 쓸모가 없을까? 인간이 운전하는 경우에도 출발지와 도착지 정보를 사용하여 거리계산이 가능하므로 컴퓨터에서도 역시 적용이 되어야 한다.
⓸ 0.1초마다 업데이트 되는 GPS에 의한 위치 정보와 이를 바탕으로 계산된 속도도 쓸모가 있지만 터널이라든지 GPS 전파가 닿지 못하는 사각지대에서는 오도미터와 IMU가 역할을 대신해야 할 것이다. 인간이 운전할 경우라도 인식하게 되는 속도와 가속도의 크기라든지 회전속도 처리가 아날로그적이면서 그렇게 정밀한 것은 아니므로 탑재된 인공지능과 오도미터와 IMU가 제대로 협업할 수 있도록 해야한다.
⓹ 시내 도로에서 자율주행 시 업데이트 되는 GPS 위치 정보는 오류를 보정할 수 있도록 컴퓨터 비젼과 학습된 맵 정보를 사용할 필요가 있을 것이다.
⓺ 자율주행 범위는 표준화가 된 시내 주행에 한하며 택시 정류장이 출발지나 도착지가 되는 것으로 가정한다. 주택가라든지 골목길 구조는 차선이 없응 수 있으므로 학습 문제가 있을 수 있음에 유의하자.
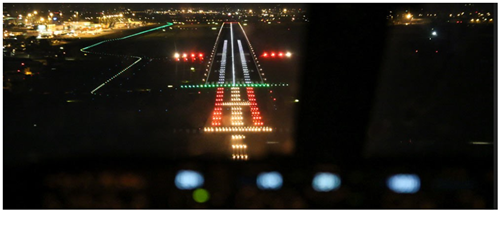
⓻ 자율주행 차량의 출발이나 도착이 이루어지는 정류장에서의 진출입을 이해하기 위해서 별도로 비상시에만 사용을 권고하는 항공기의 자동 착륙 시스템(계기착률시스템: instrument landing ssystem)이 좋은 참고가 될 수 있을 것이다. 이는 자동차의 자율주행도 마찬가지로 항공기 비상 자동착륙기술만큼이나 난이도가 높다는 것을 의미한다. 오히려 주행 중 내내 차선 유지를 해야 하므로 더욱 고난이도 기술일 수도 있을 것이다.
⑧ 안개가 심하게 낀 날씨라도 앞차와의 거리 및 상대속도 측정이 가능한 레이더 센서를 사용할 필요가 있다. 위험 거리 이내로 접근할 경우 ADAS가 작동되어 차간 안전거리를 유지하게 된다.
⑨ 도로 주행 중 안전을 확보하기 위해서 레이더 센서에 의한 거리 및 상대속도를 확인하고도 옆 차선에서 차량의 유무 및 거리를 파악할 필요가 있다. 현재 주행의 안전성 평가와 더불어 옆 차선 차량들의 가속에 따른 상황 파악이 필요하다.
⑩ 후방 차량 주행 상태에 관해서는 후방 차량이 차선변경을 통해 가속 추월하려고 하는지 여부로서 자율주행 차량 역시 차선변경으로 가속 추월하려는 시점에서 위험 여부 판단에 참고할 필요가 있다.
그밖에도 고려해야 할 많은 시나리오들이 있을 수 있음을 지적해 둔다.
'자율주행' 카테고리의 다른 글
| Windows 10 Anaconda Jupyter OpenCV 기초사용법 I (0) | 2022.08.27 |
|---|---|
| 아나콘다 설치와 가상환경 설정 (0) | 2022.08.27 |
| 미래의 가장 파괴적인 기술로서 자율주행 (0) | 2022.08.19 |
| Optical Flow in OpenCV (0) | 2022.08.05 |
| OpenCV 스테레오 비젼 (0) | 2022.08.03 |