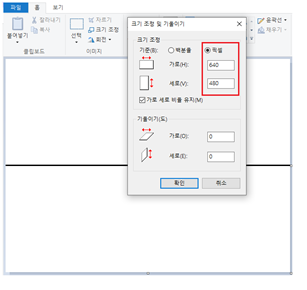
그림판을 사용하여 픽셀 해상도가 640 x 480 이 되도록 크기를 정한 후 화면 중앙에 수평선을 그은 후 파일명을 rect_line, 확장자를 jpg 로 저장하자.
아래의 이미지 파일을 다운받아 활용하자.single_line_detection.py
{kind=link}
한편 그림판에서 수평선을 긴 직사각형으로 확대한 후 커서를 사용하여 위와 아래 코너의 좌표를 찍어 보면 (0, 238) 과 (0, 242) 좌표 값을 얻을 수 있다.
오른쪽 끝의 좌표는 (639,238) 과 (639, 242) 를 얻을 수 있다.

cv2.imread 명령을 사용하여 “rect_line.jpg”를 읽어 img 로 두고 복제하여 dst 로 두자.
Canny 필터 명령에 필요한 밟기의 최대 intensity를 1000 으로 하한을 400 으로 설정하자. Canny 필터링으로 추출된 직선형 edge 데이터를 사용하여 Hough 변환작업을 하자. (ρ, θ)로 표현되는 Hough 좌표 공간에서 2는 ρ 값을 뜻한다.
| 1 | import cv2 ; import numpy as np img = cv2.imread("rect_line.jpg") dst = np.copy(img) th1 = 1000 ; th2 = 0.4 * th1 edges = cv2.Canny(img, th1, th2) print(edges.shape) |
edges.shape : (480, 640) |
cv2.HoughLinesP 명령을 실행하여 lines 로 두고 그 값과 shape을 출력해 보자.
lines 의 출력 값을 보면 그림판에서 커서로 조사했던 값 범위 내에 있으며 수평선의 선 굵기가 249 – 239 = 3 이 됨을 알 수 있다. 아울러 lineㄴ 의 첫 번째 리스트 데이터는 굵은 수평선의 위부분을 두 번째 리스트 데이터는 아랫 부분을 나타냄을 알 수 있다. 즉 굵기에 해당하는 짧은 쪽은 배제된다는 점에 유의하자.
| 2 | lines = cv2.HoughLinesP(edges, 2, np.pi/180.0, 100, minLineLength=10, maxLineGap=100) print(lines) print(lines.shape) |
lines : [[[ 0 239 639 239]] [[ 0 242 639 242]]] lines.shape : (2, 1, 4) |
아나콘다 spyder 편집기 셸(shell)에서 리스트 데이터로 출력되는 lines 의 속성이 np.array( [⦁⦁⦁]) 와 일치하는지 확인해 보기 위해서 역으로 linex, liney, linexy 를 출력해 동일한 결과가 나오는지 확인해 보자.
| 3 | for line in lines: print(line.shape) x1,y1,x2,y2 = line[0] cv2.line(dst, (x1,y1), (x2,y2), (0,0,255), 1) linex = np.array([0,239, 639, 239]) print('linex :', linex) liney = np.array([0, 242, 639, 242]) print('liney :', liney) linexy = np.array([[[0,239, 639, 239]], [[0, 242, 639, 242]]] ) print('linexy : ', linexy) |
(1, 4) (1, 4) linex : [ 0 239 639 239] liney : [ 0 242 639 242] linexy : [[[ 0 239 639 239]] |
동알한 결과를 출력함이 확인된다.
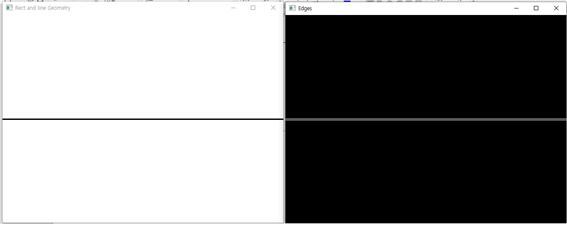
출력된 이미지를 참조하자.
위의 이미지 파일과 아래의 파이선 코드를 다운받아 실행시켜 보자.
# single_line_detection.py
import cv2 ; import numpy as np
img = cv2.imread("rect_line.jpg")
dst = np.copy(img)
th1 = 1000 ; th2 = 0.4 * th1
edges = cv2.Canny(img, th1, th2)
print('edges.shape : ', edges.shape)
lines = cv2.HoughLinesP(edges, 2, np.pi/180.0, 100, minLineLength=10, maxLineGap=100)
print('lines : ', lines)
print('lines.shape :', lines.shape)
for line in lines:
print(line.shape)
x1,y1,x2,y2 = line[0]
cv2.line(dst, (x1,y1), (x2,y2), (0,0,255), 1)
linex = np.array([0,239, 639, 239])
print('linex :', linex)
liney = np.array([0, 242, 639, 242])
print('liney :', liney)
linexy = np.array([[[0,239, 639, 239]], [[0, 242, 639, 242]]] )
print('linexy : ', linexy)
cv2.imshow("Rect and line Geometry", img)
cv2.imshow("Edges", edges)
while True:
key = cv2.waitKey(1)
if key == 27:
break
cv2.destroyAllWindows()
'자율주행' 카테고리의 다른 글
| pyqt 에러로 Spyder IDE 가 열리지 않을때 처치법 (0) | 2023.02.18 |
|---|---|
| OAKD Lite Stereo Vision Camera 아나콘다 base에 설치 및 에러 처리 (0) | 2023.02.18 |
| Curved Lane Detection with YOLOv3 (0) | 2022.10.25 |
| 11 알고리듬 특허 (0) | 2022.10.21 |
| 9장 자율주행을 위한 이미지 머신러닝 III (0) | 2022.10.21 |